MOTEC伺服驱动器多轴同步主从控制系列之速度同步解析
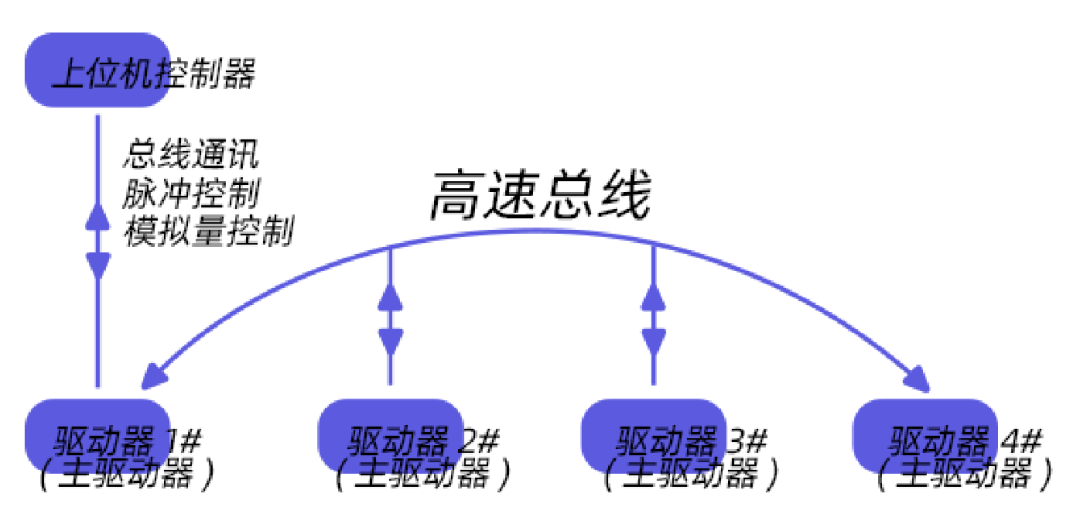
的价格来达到多轴同步控制的功能,解决方案具备极高的性价比和简便的操作使用方式。系统可组建最多1主3从的主从
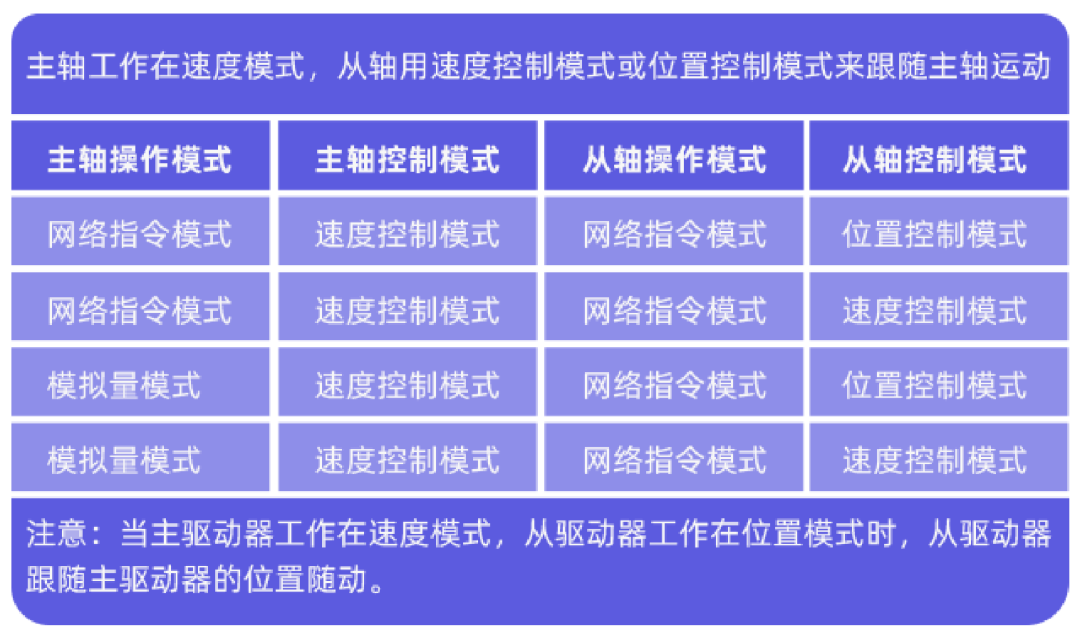
在主从速度控制模式下从驱动器和主驱动器的实际速度差值超过主驱动器设定的最大位置误差值时,主驱动器将会进入同步误差报警,并停止运动。随着主驱动器停止运动从驱动器也会跟随停止运动。
在主从速度控制模式下,主轴的控制型号来源可以是网络指令方式、驱动器内置PLC指令或模拟量信号。而在网络指令方式时,上位机可以用MODBUS、CANOPEN或MOTEC协议,能够正常的使用专用控制器、HMI触摸或者是PLC和PC,轨迹规划方式有S曲线、T曲线。上位机只需要单独对主站驱动器做相关操作,无需对从站来控制。当主从轴之间有工作异常时,主从轴会报警并停止工作。
1)主从轴的速度按照一定的比例关系(电子齿轮)运动,不同的从轴可以设定不同的比例关系;
2)如果由于特殊的机械关系,主从轴必须运行在速度模式。而由于机械误差或控制误差会引起主从电机之间较劲的场合,我们大家可以提供主从轴交叉耦合的控制方式,解决电机较劲的问题;
3)而对于主从轴需要运行在主轴位置或速度模式,从轴是速度模式的双电机消隙的控制方式。
文章出处:【微信号:旺材伺服与运动控制,微信公众号:旺材伺服与运动控制】欢迎添加关注!文章转载请注明出处。
精密运动 精密加工是一个多步骤过程,先是粗略切削,然后经过多道精细切削才能达到一定的要求。多个电机
的重要组成部分,被大范围的应用于工业机器人及数控加工中心等自动化设备中。尤其是应用于
技术应用 /
的设计应用 /
原理及结构 /
基于 EtherCAT 技术,Beckhoff 公司的 TwinCAT 软件
运动方案 /
安装与接线 /
电机拥有广泛的标准产品,为您提供了最佳选择和灵活性 – 这一些产品经过优化与科尔摩根
电机 /
用方法 /
的重要组成部分,被大范围的应用于工业机器人及数控加工中心等自动化设备中。尤其是应用于
具有集成帧处理程序的IO-Link设备PHY评估板CCE4502-EVAL-V4数据手册